萬盛學電腦網 >> 圖文處理 >> CAD >> CAD使用教程 >> 常見案例解析 >> Pro/E鏈傳動虛擬裝配設計及運動模擬技術的應用
Pro/E鏈傳動虛擬裝配設計及運動模擬技術的應用
一、鏈傳動概述
鏈傳動有短節距精密滾子鏈、雙節距精密滾子鏈、短節距精密套筒鏈、彎板滾子傳動鏈、齒形傳動鏈以及成型鏈等多種傳動類型。鏈傳動的突出特點是構成鏈條的元件體積小、數量多,鏈節節距均勻,滾子/套筒結構可以減少嚙合時的摩擦和磨損,並能達到緩和沖擊的目的。
鏈傳動的運動學模擬效果對於機械總體檢查、鏈節結構設計與改進及鏈節數量的配置具有重要的驗證作用,鏈傳動運動動畫對於鏈傳動機構的產品演示、項目開展與交流不可或缺。
由於鏈節元件小而多的特點決定了鏈條傳動的靈活性和實用性,而元件數量過多使得鏈傳動三維機構模擬在普通計算機上難以實現,巨大的求解數據量對三維軟件和計算機硬件的配置提出了很高的要求,在通用CAD三維軟件中進行模擬鏈傳動困難很大。本文將探討在Pro/ENGINEER野火版環境下進行鏈傳動設計與運動學模擬,最後推薦兩個專業的鏈傳動動力學模擬軟件環境,希望對鏈傳動用戶有所幫助。
二、Pro/ENGINEER鏈傳動三維設計與運動學模擬
鏈傳動的設計首先要根據傳動功率要求確定大小鏈輪的齒數、鏈節運動軌跡以及鏈節的類型和規格,通過計算確定出鏈節數量,為鏈傳動機構模擬打好基礎。下面是鏈傳動模擬的構建流程。
1.步驟一
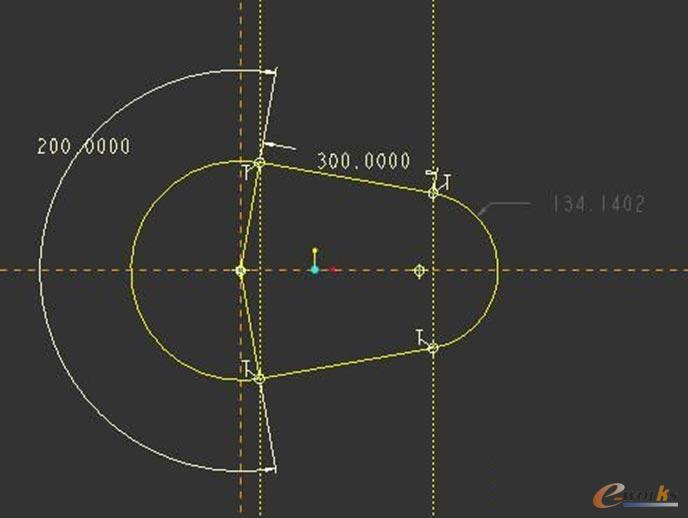
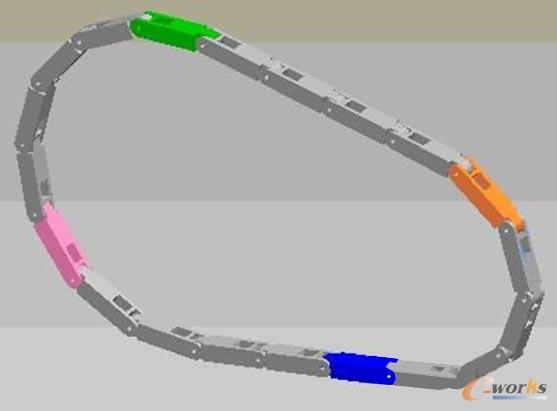
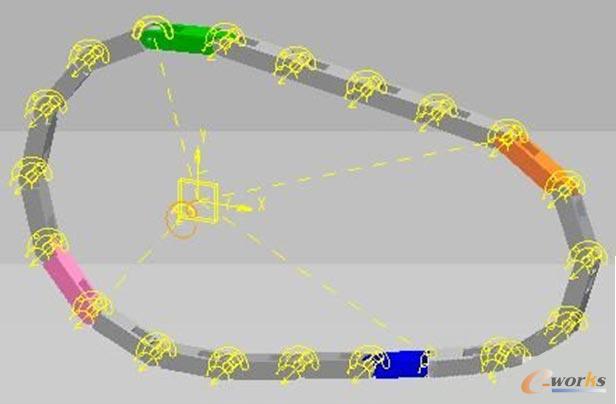
設計鏈傳動運動軌跡,確定鏈節的接口長度和節數。如圖1和圖2所示,使用草繪曲線繪制軌道,兩鏈輪中心線水平。該次鏈傳動設計共20節鏈節(這裡沒有繪制大小鏈輪)。
圖片看不清楚?請點擊這裡查看原圖(大圖)。
關鍵字: AutoCAD 2009 Photoshop手繪 AutoCAD對象 中望CAD AutoCAD三維造型
本文講述了鏈傳動的三維虛擬裝配與運動學模擬在Pro/ENGINEER軟件中的實現方法,並對鏈傳動動力學模擬提出了使用專業模擬平台的建議。
圖1 鏈傳動軌跡曲線
圖片看不清楚?請點擊這裡查看原圖(大圖)。
圖2 鏈條模型
2.步驟二
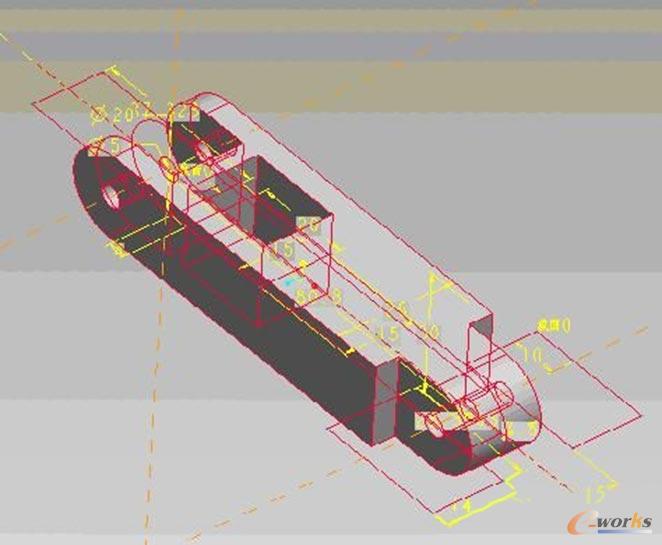
設計鏈節元件。可以按照實際情況設計構成鏈節的內/外鏈板、銷軸和套筒,然後組裝成鏈節子組件。為了減小鏈傳動機構模擬運算的時間和運算數據量,這裡僅用一個零件代表鏈節的所有組成元件(如圖3)。
3.步驟三
鏈條組件第1、2個鏈節的裝配。創建鏈條組件,裝配第1個鏈節(如圖4),使用1個"平面"接頭、2個"槽"接頭。選槽曲線時按ctrl鍵選4段。裝配第2個鏈節(如圖5)時,在第1個鏈節右側裝配第2個鏈節,使用1個圓柱接頭和1個槽接頭。
圖片看不清楚?請點擊這裡查看原圖(大圖)。
圖3 簡化鏈節模型
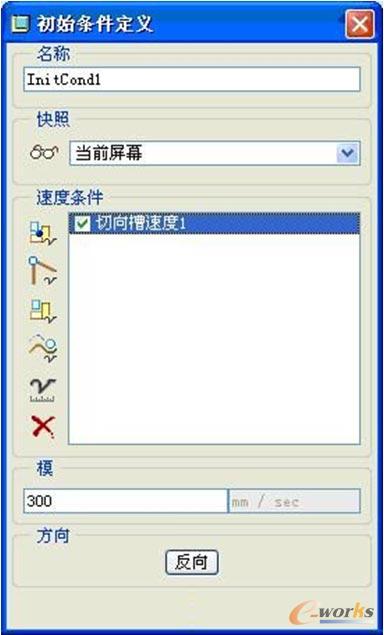
圖4 裝配第一個鏈節
關鍵字: AutoCAD 2009 Photoshop手繪 AutoCAD對象 中望CAD AutoCAD三維造型
本文講述了鏈傳動的三維虛擬裝配與運動學模擬在Pro/ENGINEER軟件中的實現方法,並對鏈傳動動力學模擬提出了使用專業模擬平台的建議。
圖5 裝配第二個鏈節
4.步驟四
使用動力學模擬技術模擬鏈傳動。從標准建模環境轉到機構模擬環境(從"應用程序"→"機構"),從"插入"→&quo
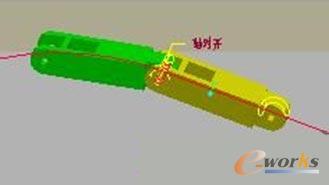
t;初始條件",打開"初始條件定義"對話框。點擊定義切向槽速度圖標 ,選第一個鏈節上的槽連接符號(如圖6),輸入速度值300mm/sec。從"分析"→"機構分析",彈出"分析定義"對話框,選用"動態"分析類型,初始配置啟用初始條件,電動機和外部負荷選項卡全部清除選取。點擊"分析定義"對話框底部的 按鈕,可以發現兩個鏈節沿著軌道運動。

圖6 設置切向槽速度方向
圖7 初始條件定義
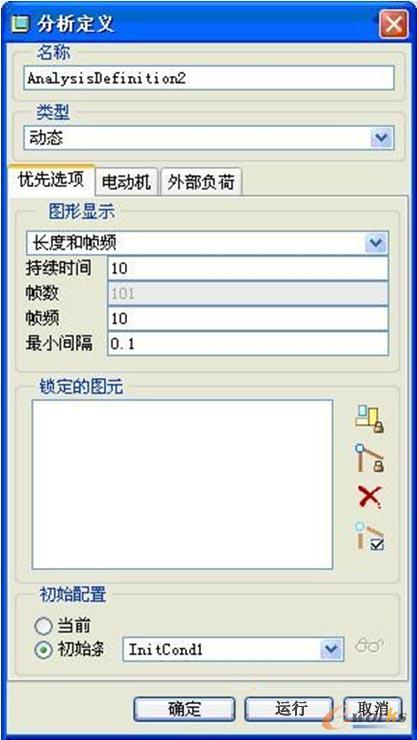
圖8 動態分析定義
該方法是用動力學模擬的切向槽速度為初始條件,並且使用動力學模擬的"動態"分析類型模擬運動學軌跡。這對於幾個鏈節的運動是可以的,如果將所有鏈節都裝配到位,則鏈條的機構模擬需要非常高的硬件配置,而且需要更長的運行計算時間。
關鍵字: AutoCAD 2009 Photoshop手繪 AutoCAD對象 中望CAD AutoCAD三維造型
本文講述了鏈傳動的三維虛擬裝配與運動學模擬在Pro/ENGINEER軟件中的實現方法,並對鏈傳動動力學模擬提出了使用專業模擬平台的建議。
5.步驟五
使用運動學模擬技術模擬整根鏈條的傳動。由於步驟四的模擬方法需要求解力學屬性,給模擬運算帶來了一定的困難。下面是使用運動學分析類型進行模擬。
按步驟三裝配其他鏈節:選中第2個鏈節,順時針方向使用"重復"命令裝配其他零件接頭關系,只重復圓柱接頭,如果元件重疊則移除重疊元件,退出"重復"對話框;選中最後1個元件重新進行重復操作,直到重復完成第20個鏈節(如圖2)。裝配完注意到最後一個鏈節的後安裝孔無法與第1個鏈節的前安裝孔軸對齊,可以將最後一個鏈節創建一個單獨的零件,使孔軸盡量對齊(受裝配誤差和軌道位置的影響,在運動過程中該處無法實現軸完全對齊,如圖9所示)。將第1、6、 11、16個鏈節添加不同顏色,並在第6、11、16個鏈節上進行新設置,增加平面副(如圖10)。
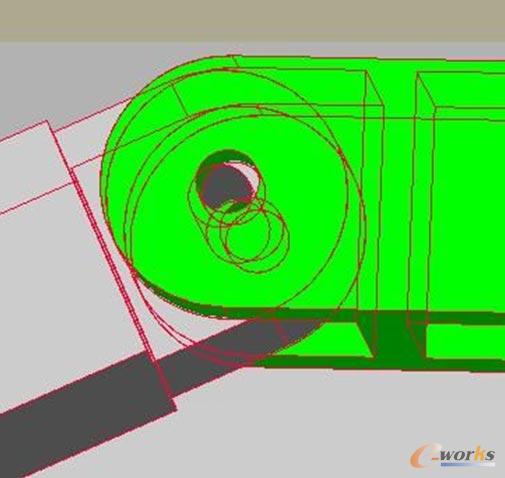
圖9 最後一個與第一個鏈節無法對齊
圖片看不清楚?請點擊這裡查看原圖(大圖)。
圖10 添加另外3個平面副
再分別參照4個平面副定義角速度,使第1、6、11、16個鏈節在圓周上運動時分別充當驅動元件,每次轉過125度。另外,通過核查運算,如果角速度為125度/秒時,則第1個鏈節旋轉一周大約需要時間4.2s。
關鍵字: AutoCAD 2009 Photoshop手繪 AutoCAD對象 中望CAD AutoCAD三維造型
本文講述了鏈傳動的三維虛擬裝配與運動學模擬在Pro/ENGINEER軟件中的實現方法,並對鏈傳動動力學模擬提出了使用專業模擬平台的建議。
進入機構環境,將當前裝配體拍攝快照。參照第1、6、11、16個鏈節上的平面副接頭Z軸(查詢選取)定義伺服電動機(如圖11和圖12)。所有電機設置均為:速度方向(紫色箭頭)向外,按右手定則逆時針旋轉鏈條。設置速度初始角,選中"當前",速度值為125。
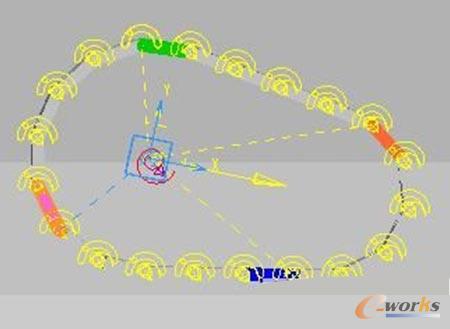
圖11 運動角速度定義
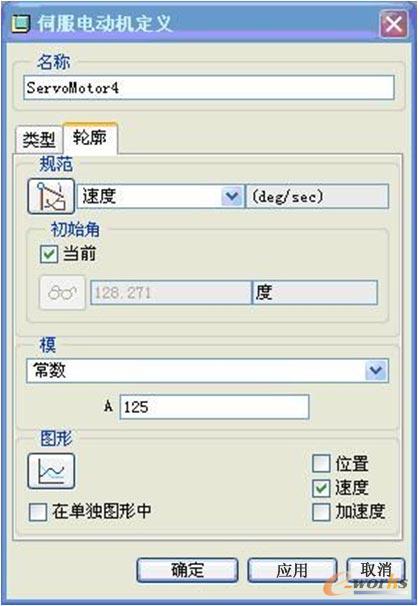
圖12 速度定義設置
定義並運行運動分析。類型選擇"運動學",終止時間為4.2s(如圖13)。在"電動機"選項卡中,設置每個電動機的生效時間段是這次鏈傳動模擬的關鍵。由於前後兩個電動機在臨界點處不能重合(單一函數值),所以第2個電動機的起始時間比第1個電動機的結束時間推遲0.01s(如圖14),對於這 0.01s的時間差在最小時間間隔范圍之內,是模擬計算誤差所允許的。點擊"運行",鏈傳動正常運行。
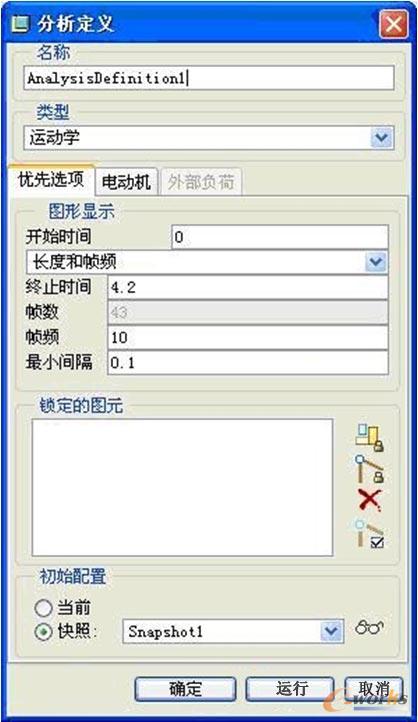
圖13 運動學定義



